Uydu Navigasyonu

acılı werther
Uydu navigasyonundan anlayacağımız şey bir adet alıcı cihaz ile ki bu herhangi IoT cihazı ( elefon, PC, tablet vs gibi internete çıkabilen bir diğer tabirle IP
Uydu navigasyonundan anlayacağımız şey bir adet alıcı cihaz ile ki bu herhangi IoT cihazı ( elefon, PC, tablet vs gibi internete çıkabilen bir diğer tabirle IP alabilen bütün cihazlar) uydunun haberleşip alıcı cihazın konumun tayin edilmesi olayıdır. Gündelik hayatın vazgeçilmez bir parçası olmasının yanı sıra henüz çok bakir ve gelişmeye açık bir alandır.
Bütün uluslararası uydu navigasyon sistemleri kısaca GNSS (global navigation satellite system) kısaltmasıyla bilinir ve hemen hemen hepsinin altında yatan fiziksel prensipler ve teknik adaptasyonlar aynıdır.
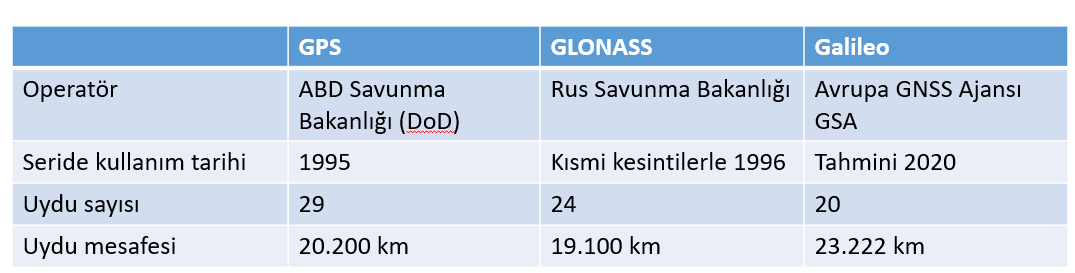
En önemli iki GNSS sistemi tahmin edebileceğiniz üzere ABD ve Rusya’ya aittir. ABD’ye ait olan sisteme GPS (Global Positioning System), Rusya’ya ait olanına ise GLONASS (Globalnaja nawigazionnaja sputnikowaja sistema) isimleri verilmiştir. Her iki sistem de şu anda birkaç metreye kadar konum tayini yapabilmektedir. Hassasiyet yardımcı hesaplamalar ile (yer kabuğunun yükseltisi gibi) milimetre seviyelerine kadar da inebilmektedir. Bu iki uydunun dışında henüz yapım aşamasında olan ve tamamiyle sivil kullanıma ayrılmış Avrupa menşeili Galileo isimli uydu sistemi 2020’de devreye girecektir.
GNSS sistemleri çalışma prensibi
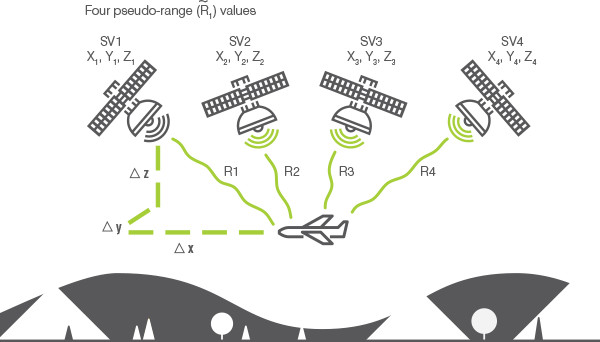
Temel fikir, belirli sayıda konumları bilinen uydular vasıtasıyla göreceli olarak alıcının konumunun hesaplanabilmesidir. Uyduların konumları bilindiğine göre fizik kanunlarına göre yeri bilinmeyen alıcı cihazın konumu hesaplanabilir.
Çalışma prensibini anlamak için bir alanı baz alırsak, cihaz uydu ile haberleştiğinde bir daire alanı oluşarak o alanın içerisinde cihazın olduğu saptanır. Akabinde cihaz ikinci uydu ile haberleştiğinde bir daire alanı daha oluşur ve bu iki daire iki noktada kesişir. Bu iki kesişim alanının içerisinde kalan bölge bazı konum tayinleri için yeterli olabilir (arsa, bahçe gibi). Daha net bir konuma ihtiyaç varsa üçüncü uydu devreye girmelidir. Eğer yerkürenin belli bir yükseltisinde ölçüm yapılmak istenirse bu durumda 4. uydu devreye girer.
Uydu tarafından yayınlanan sinyalde uydu konum bilgileri ve zaman sinyalleri bilgisi taşınır. Uydu konum bilgileri ve birbirlerine olan uzaklıkları hesaplamada referans alınacağından önemlidir. Zaman sinyalleri ise Sinyal ulaşma zamanlarını ölçerek uydu cihaz arasındaki mesafeyi hesaplamada yardımcı olur. Zaman sinyali ile uydunun sinyalinin alıcıya ulaşması için geçen süre hesaplanır. Bu sinyal ışık hızında yani saniyede 300.000 km ile ilerlediğinden zaman sinyalinin doğruluğu çok önemlidir. Milyonda bir saniyelik zamanlama hatası alıcının yerinin 300 m kadar yanlış gösterilmesine sebebiyet verir. Normal kalibreli kronometreler bir ayda ortalama 1 saniye sapma yaparlar. Eğer bu kronometreler bu zaman sinyallerini ölçmek için kullanılsaydı saniye başına 300 m navigasyon hatası alacaktık ki bu kabul edilemez bir durum olurdu. Bunu engellemek adına atom saati denilen özel sayaçlar kullanılmaktadır.
Zamanlama hesabında doğruluk için zaman sinyalinin uydudan çıktığı zaman ile alıcının zamanı senkron olmalıdır. İkisi arasında oluşacak zaman farkı yine inanılmaz sapmalara sebebiyet verecektir. Zaman senkronizasyonundan dolayı oluşan yanlış konum tayinlerine literatürde ‘Pseudoranges’ adı veriliyor.
Bu Pseudorangeden dolayı uyduların taradıkları daireler (aslında küre tarıyor ama prensipte bir şey değişmeyeceği için daire üzerinden gitmek olayı basitleştiriyor) aslında olması gerekenden biraz daha büyük oluyorlar. Bu yarıçapın r=c*t kadar büyüdüğünü düşünebiliiz. Bu durumda artık üç daire bir noktada kesişmeyecek, birden fazla kesişim kümesi olacaktır. Uydu bunu anlıyor ve üst üste t’nin deltasını küçülterek sinyaller gönderiyor ta ki t=0 olana kadar. Bu senkronizasyon aynı şekilde uydular için de yapılıyor.
Share Your Expertise, Earn Rewards!
Found this insightful? Imagine your knowledge generating income. Contribute your articles to bylge.com and connect with readers while unlocking your earning potential.